Since we released the first version of the mobile SLAM for AR/VR glasses and robots in 2017 I have had conversations regarding its integration with more than 90 different vendors and OEMS.
Below I list a number of strategic questions that we discuss most often at meetings and my vision related to them.
I think, that this information will be useful to large mobile companies and chip manufacturers, as well as to medium and small vendors that want to disrupt the market or occupy unique niches on the markets of AR / VR glasses and mobile robotics.
1. Who needs SLAM in-house, and who can license it?
Usually the choice of doing yourself or licensing SLAM of someone else is determined by the following factors:
– Development of SLAM “from scratch” is associated with quite serious risks in the field of research (a lot of large companies spent 3-4 years on their own development and could not deliver a solution).
– With the huge demand for SLAM solutions that exists on the market, most investors are very careful with investing in SLAM start-ups as the majority of such companies are not able to come up with a robust product.
– Every two to three years, new sensors and specialized chips appear on the market, which makes it possible to radically cut costs and improve the quality of b2c products. However, the support of the new hardware requires constant changes to the core of SLAM, fusion algorithms, and so on. Development and maintenance of SLAM requires an equally qualified team (a team of researchers that could not create SLAM is not able to make changes to it).
– All available open-source SLAM solutions can be used for testing and prototyping, but none of these solutions is suitable for production in terms of quality and speed.
Based on these 4 factors, it turns out that the only optimal strategy about SLAM for medium and small companies due to limited investment resources is licensing of existing solutions on the market, but global companies need to have a team that is capable of a full cycle of development and support of the SLAM in-house.
2. What is a “must have” in SLAM, and what is a desired feature?
There are many companies on the market right now that deal with SLAM and the infrastructure that accompanies it.
SLAM in different solutions consists of tracking, localization, mapping etc.
The most critical part of SLAM is the general architecture, fusion, fast stable tracking, fast re-localization / recovery.
All other components are more or less the same in terms of architecture and can be developed with much lower risk.
If you do not have a team that was able to implement fusion and tracking, then you do not have SLAM.
Therefore, you will not be able to create future products in for AR / VR glasses and robotics on your own.
3. Why does everyone want SLAM for a mono camera and IMU, but almost no one has it?

The availability of SLAM that works with a mono camera “as in a phone” and the IMU means achieving a radical cost reduction of the solution when it comes to production, which is critical for mobile phones, mass-market AR/VR glasses and home robots(vacuum cleaners et).
There are relatively many solutions for stereo cameras, but taking them to production often turns into a nightmare: =)
4. How does SLAM improve the margins of chips and the margins of silicone business in general?

All companies that want to release phones with AR/VR features, AR/VR glasses and robotics don’t need “just SLAM”.
They need a cost efficient working architecture, which includes SLAM itself, a camera + IMU, a processor and a whole “factory assembly”, including calibration and so on.
Therefore, when customers come to us, they ask whether our SLAM supports a particular chip.
If not, then it is easier for them to work with the chips, cameras and IMU that our SLAM works with, especially if the production is planned this / next year.
On the one hand, it is a situation of “inflexibility” of the market, but on the other hand it is a great opportunity for silicone companies, since having a working SLAM on their platform they can sell chips with huge margins.
I would even say that the availability of any computer vision solutions on chips now allows silicone companies to significantly raise their margin on the market, which has gradually become commoditized with a corresponding low margin for products.
5. How to divide on the architectural level SLAM on a chip and SLAM on a host?
SLAM is a real-time system with very high demands for stability and speed of the infrastructure.
However, for some solutions it is possible to create «custom architecture», which allow to move the most intense processes to the specialized chips (e.g. Movidius) and so on, while less critical operations could be performed on the main processor.
Such customized solutions in SLAM architecture often lead towards more effective energy consumption, decrease the cost of hardware and increase agility of the solution.
6. How to check the quality of the SLAM that your team or an independent vendor has developed?
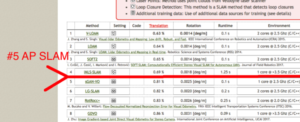
There is a number of the following datasets that are available on the market, that could be “fed” into SLAM to check relative KPIs of SLAM from the attained results.
But I should note that not all datasets are ideal, so you should be prepared to conduct their verification and correct data as nearly everywhere there are errors in data, calibration, ground truth and so on.
Benchmarks on such datasets are representative when solutions are compared, but in fact the ONLY criteria of SLAM’s work is its robust performance in YOUR OWN HANDS :=)
7. Maps and SLAM – where is the main long-term value?
The market of the solutions that require SLAM is still at its infancy, therefore cheap high-quality tracking is what everyone needs right now.
However, in the long run, I think that mapping in SLAM and real-time analytics will be the features that will take more prominent role as they bring long-term value and can help to accumulate strategic knowledge(please check my article about this – “Why SLAM 3D maps for Augmented Reality and Robotics will be worth more than Google Maps”).
An illustration of this is the recent scandal involving Rumba vacuum cleaners collecting maps of the premises.
To sum up, I would like to highlight that SLAM and real-time analytics of maps are now turning into critical technologies at the markets of AR / VR and robotics; without these technologies it won’t be possible to dominate these markets.
I hope that the insights in this article were useful to you!
I will be glad to answer any additional questions!
Sincerely,
CEO and Founder of Augmented Pixels
Vitaliy Goncharuk